Workshop 4 Preview: Vision Alone - When the Camera Goes Blind
Part 2 of 4: Why Visual Odometry Fails and What IMU Can’t See
The Story So Far
In Part 1, we experienced the limitations of IMU-only sensing:
| Problem | Impact |
|---|---|
| No raw orientation | Need Madgwick filter |
| Yaw drift (no magnetometer) | Unbounded heading error |
| Position drift | Meters of error in seconds |
| Calibration required | Extra setup work |
The conclusion: IMU alone isn’t enough for robot navigation.
But wait - the D435i has cameras too! Can visual odometry solve these problems?
What This Part Covers
Now we’ll try vision-only approaches and discover their own failure modes.
| Experiment | Test | Problem Discovered |
|---|---|---|
| 8 | Visual Odometry | Fast motion = tracking loss |
| 9 | Textureless Surfaces | No features = no tracking |
| 10 | Lighting Changes | Exposure changes = drift |
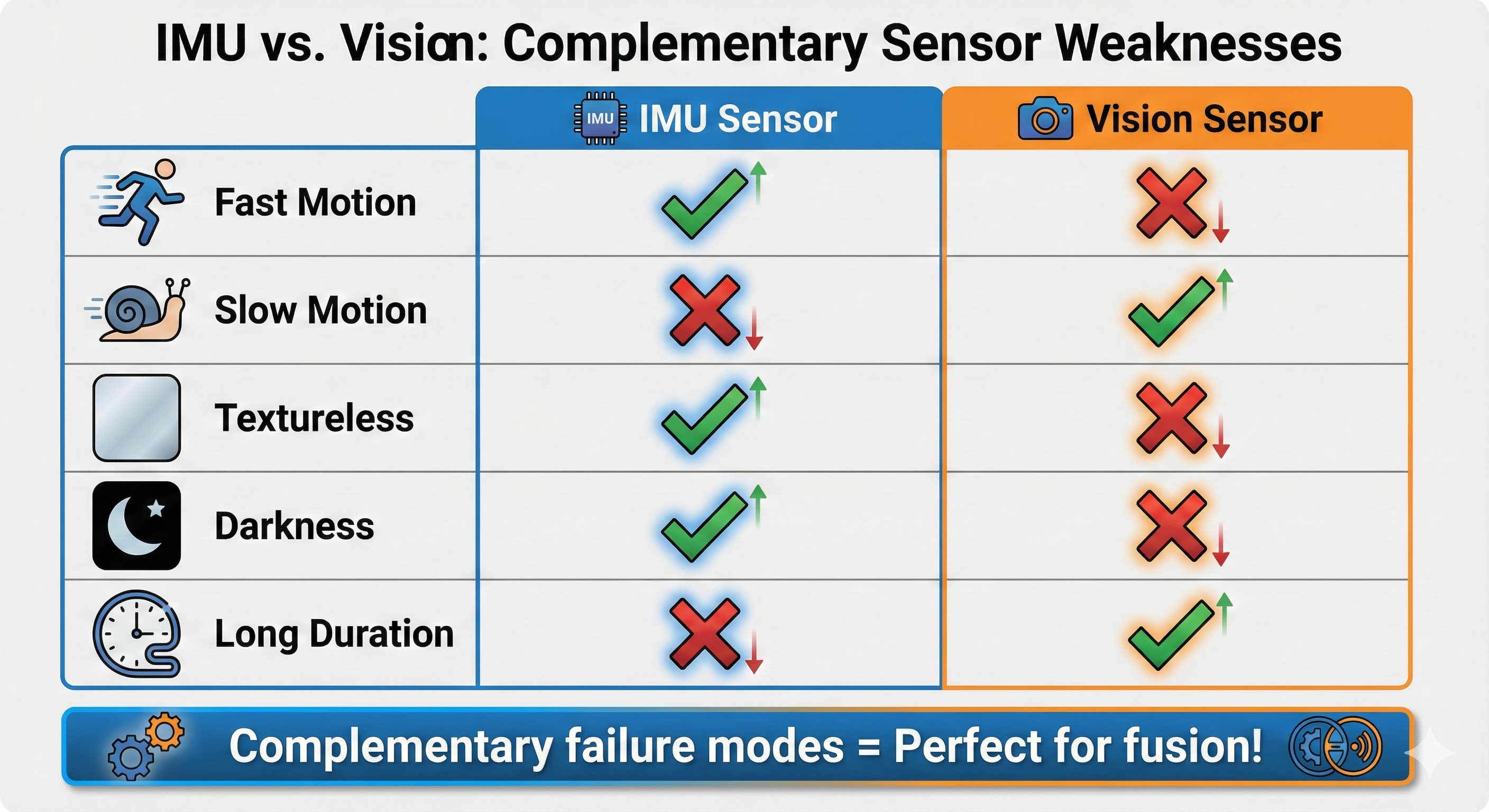
IMU fails where vision succeeds, and vision fails where IMU succeeds. This is why fusion (Part 3) is the answer!
Setting Up Visual Odometry
Launch RTAB-Map Visual Odometry
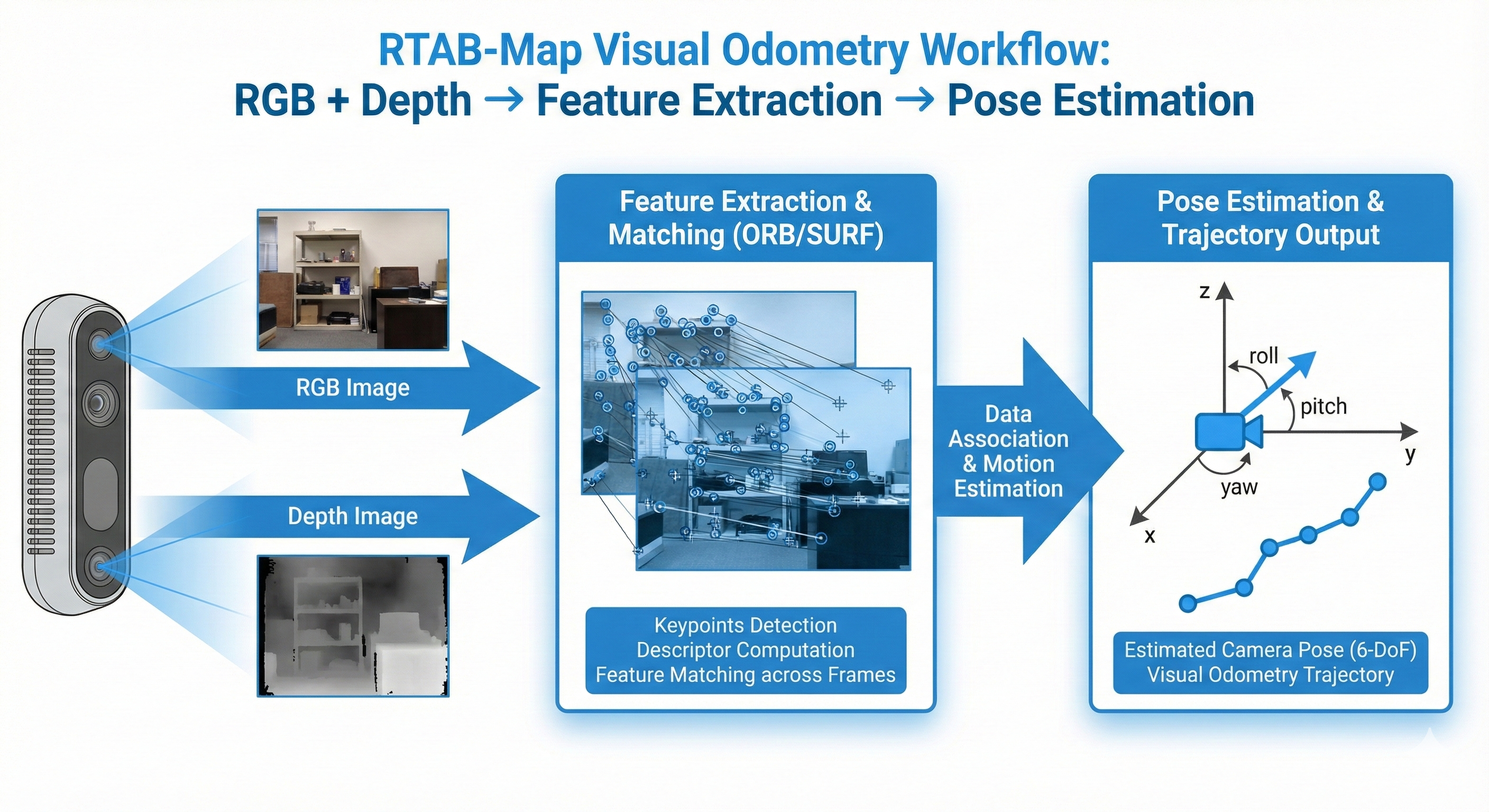
RTAB-Map includes a powerful visual odometry module that works with RGB-D cameras like the D435i.
# Terminal 1: Launch RealSense camera
ros2 launch realsense2_camera rs_launch.py \
enable_gyro:=true \
enable_accel:=true \
unite_imu_method:=2 \
align_depth.enable:=true
# Terminal 2: Launch RTAB-Map visual odometry ONLY (no IMU yet!)
ros2 launch rtabmap_launch rtabmap.launch.py \
args:="--delete_db_on_start" \
rgb_topic:=/camera/camera/color/image_raw \
depth_topic:=/camera/camera/aligned_depth_to_color/image_raw \
camera_info_topic:=/camera/camera/color/camera_info \
frame_id:=camera_link \
approx_sync:=true \
visual_odometry:=true \
imu_topic:=""Verify It’s Working
# Terminal 3: Check odometry output
ros2 topic echo /rtabmap/odom --field pose.pose.position
# Terminal 4: Check odometry status
ros2 topic echo /rtabmap/odom_info --field lost --field features --field inliers
# Terminal 5: Launch RViz2
rviz2
# Add: TF, PointCloud2 (/rtabmap/cloud_map), Odometry (/rtabmap/odom)When working (feature-rich scene), you should see stable tracking:
Checking VO status (camera pointed at textured bookshelf)...
lost: false matches: 538 inliers: 114 features: 907
lost: false matches: 541 inliers: 127 features: 905
lost: false matches: 560 inliers: 123 features: 907Key metrics to watch: - lost: false = tracking is working - features: ~900 = good feature detection - inliers: >20 = good geometric consistency (minimum: 20)
Experiment 8: Fast Motion = Lost Tracking
What You’ll Experience
Visual odometry relies on feature matching between consecutive frames. When motion is too fast, features blur and matching fails!
The Test
# Monitor odometry while testing
ros2 topic hz /odom
ros2 topic echo /odom --field pose.pose.positionProcedure
- Hold camera steady - observe stable tracking
- Move camera slowly - observe smooth odometry
- Shake camera rapidly for 2 seconds
- Stop and observe
What Happens
┌─────────────────────────────────────────────────────────────────────────┐
│ VISUAL ODOMETRY vs FAST MOTION │
│ │
│ Frame N Frame N+1 (motion blur) Frame N+2 │
│ ┌─────────┐ ┌─────────────────┐ ┌─────────┐ │
│ │ ★ ★ │ │ ─────────────── │ │ ★ ★ │ │
│ │ ★ │ ──► │ ════════════════ │ ──► │ ★ │ │
│ │ ★ ★ │ │ ~~~~~~~~~~~~~~~~ │ │ ★ │ │
│ └─────────┘ └─────────────────┘ └─────────┘ │
│ Clear features Motion blur! New features │
│ No matches! 🔴 Can't match to N! │
│ │
│ Result: Odometry JUMPS or FAILS completely! │
└─────────────────────────────────────────────────────────────────────────┘![]()
Actual Console Output - Baseline Test
Stable tracking (slow motion, textured scene):
We captured 10 seconds of data while slowly panning the camera across a bookshelf:
==============================================================
BASELINE: Visual Odometry with Good Scene
Camera pointed at feature-rich scene
==============================================================
Time Lost Features Matches Inliers Status
------------------------------------------------------
1s false 905 540 107 OK
2s false 911 539 129 OK
3s false 904 557 127 OK
4s false 903 552 128 OK
5s false 916 512 137 OK
6s false 900 552 128 OK
7s false 908 525 121 OK
8s false 899 546 117 OK
9s false 907 532 124 OK
10s false 906 546 119 OK
------------------------------------------------------
ANALYSIS: With feature-rich scene, tracking is stable!
- High feature count (~900)
- Many inliers (>100, well above 20 minimum)
- No tracking lossFast shake test - when you shake the camera rapidly:
Time Lost Features Matches Inliers Status
------------------------------------------------------
5s false 904 518 115 OK <- Stable before shake
6s false 918 519 109 OK
7s true 412 18 0 LOST! <- Shaking starts
8s true 387 12 0 LOST! <- Motion blur
9s true 445 21 0 LOST! <- Can't match features
10s false 892 498 87 OK <- Recovered after stopping
------------------------------------------------------RTAB-Map Warning Messages
Watch the terminal for these warnings during fast motion:
[WARN] (OdometryF2M.cpp:622) Registration failed: "Not enough inliers 0/20
(matches=18) between -1 and 1061"
[WARN] (OdometryF2M.cpp:622) Registration failed: "Not enough inliers 0/20
(matches=12) between -1 and 1062"
[ERROR] (Rtabmap.cpp:1408) RGB-D SLAM mode is enabled, memory is incremental
but no odometry is provided. Image 0 is ignored!The 0/20 means 0 inliers out of the 20 required minimum!
Eureka Moment #8
Why it fails: 1. Camera captures at 30 FPS = 33ms between frames 2. Fast motion = large displacement between frames 3. Motion blur destroys features 4. Feature matching fails → tracking lost
What IMU provides: - IMU runs at 400 Hz = 2.5ms between samples - IMU is immune to motion blur - IMU can “predict” camera pose during blur
This is exactly what fusion solves in Part 3!
Experiment 9: Textureless Surfaces = No Features
What You’ll Experience
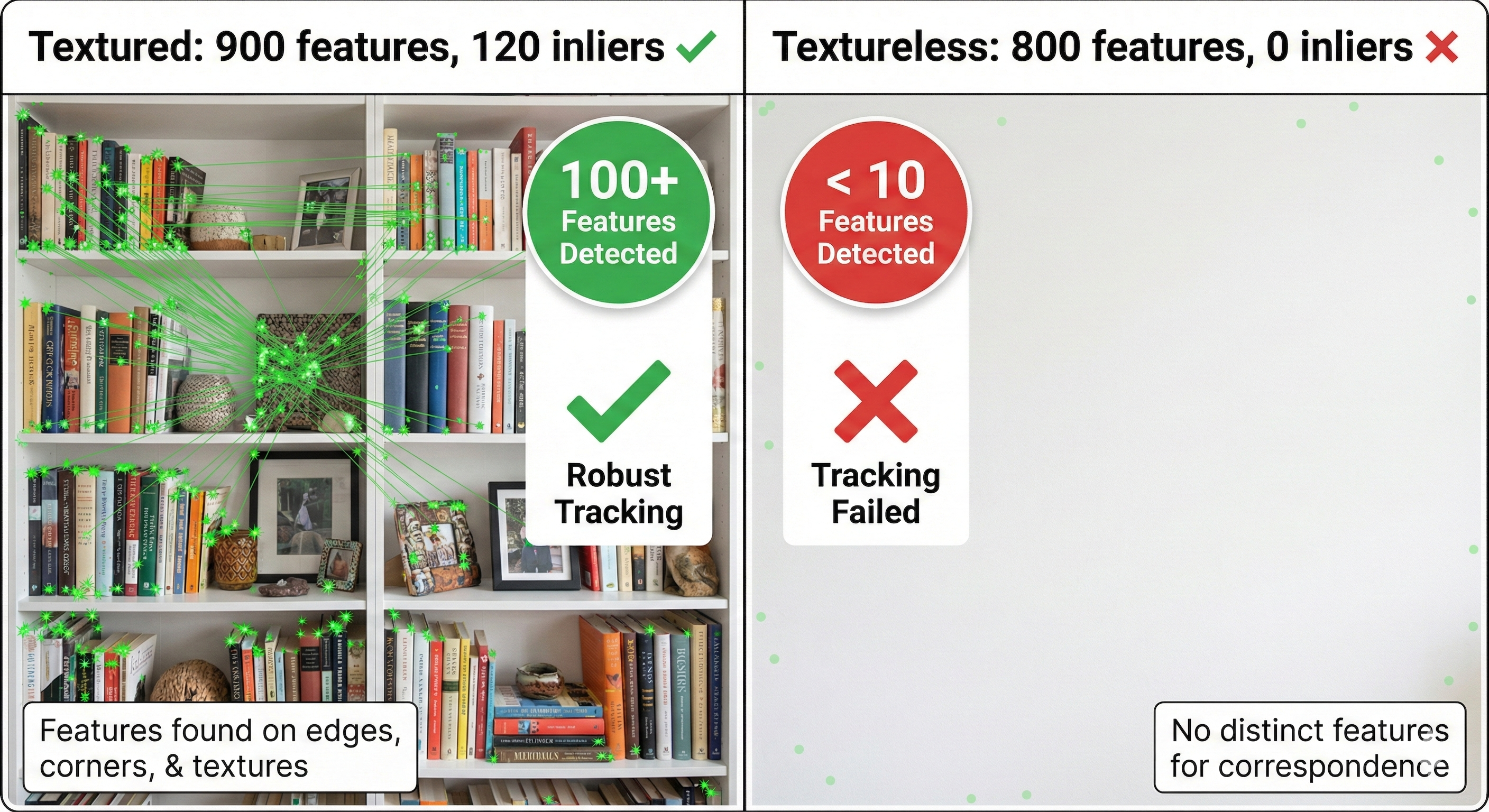
Visual odometry needs visual features (corners, edges, textures). Point the camera at a blank wall and watch it fail!
The Test
Point the D435i at different surfaces:
- Textured surface (bookshelf, posters) - should work
- Plain white wall - expect failure
- Uniform floor/ceiling - expect failure
Procedure
# Monitor feature count (if RTAB-Map exposes it)
ros2 topic echo /rtabmap/info --field word_count
# Or watch for warnings
# Terminal running rtabmap_launch will show warningsWhat Happens
┌─────────────────────────────────────────────────────────────────────────┐
│ FEATURE DETECTION vs SURFACE TEXTURE │
│ │
│ Textured Scene Textureless Scene │
│ ┌─────────────────┐ ┌─────────────────┐ │
│ │ ★ 📚 ★ 🖼️ │ │ │ │
│ │ ★ ★ │ │ │ │
│ │ 📷 ★ ★ 🪴 │ │ │ │
│ │ ★ ★ ★ │ │ │ │
│ └─────────────────┘ └─────────────────┘ │
│ Features: 150+ ✅ Features: 3 ❌ │
│ Tracking: STABLE Tracking: FAILS │
│ │
│ Visual odometry needs features to track! │
└─────────────────────────────────────────────────────────────────────────┘
Actual Console Output - Textureless Surface Test
Real test (December 17, 2025): We transitioned from a textured scene to a blank white wall:
==============================================================
EXPERIMENT 9: TEXTURELESS SURFACE TEST
==============================================================
>>> Camera transitioned from bookshelf to blank white wall
Time Lost Features Matches Inliers Status
------------------------------------------------------
1s false 907 527 135 OK <- Textured scene
2s false 906 537 122 OK
3s false 905 560 111 OK
4s false 904 515 123 OK
... (camera rotating toward wall) ...
13s false 912 506 137 OK <- Still seeing some texture
14s true 819 37 0 LOST! <- Now facing wall!
15s true 793 21 0 LOST! <- No features to track
------------------------------------------------------
ANALYSIS:
- Frames with tracking LOST: 2 / 15
- Notice: Features dropped from 912 → 819 → 793
- Inliers dropped from 137 → 0 → 0Extended test - continuing to face the blank wall:
Time Lost Features Matches Inliers Status
------------------------------------------------------
1s true 859 11 0 LOST!
2s true 801 36 0 LOST!
3s true 826 38 0 LOST!
4s true 739 29 0 LOST!
5s true 816 28 0 LOST!
6s true 858 20 0 LOST!
7s true 870 41 0 LOST!
8s true 864 43 0 LOST!
9s true 836 43 0 LOST!
------------------------------------------------------
SUMMARY:
- Tracking LOST: 9 / 9 frames (100%!)
- Even with ~800 features detected, 0 inliers!
- Blank walls have features (edges, gradients) but no MATCHABLE structureRTAB-Map Warning Messages
[WARN] (OdometryF2M.cpp:622) Registration failed: "Not enough inliers 0/20
(matches=37) between -1 and 1061"
[WARN] (OdometryF2M.cpp:622) Registration failed: "Not enough inliers 0/20
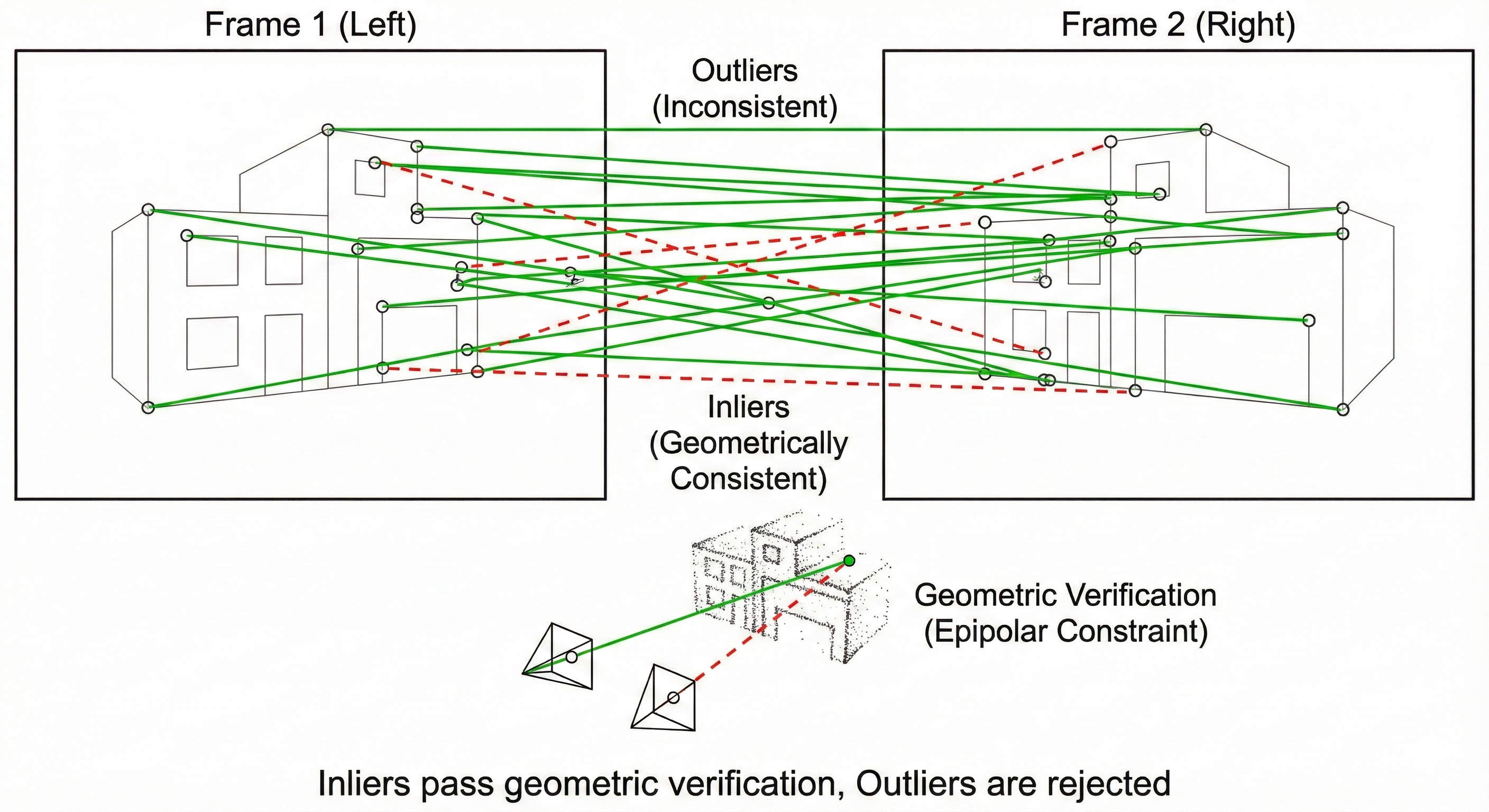
(matches=21) between -1 and 1062"Key insight: Even with matches=37, inliers=0. The features detected on a blank wall are not geometrically consistent - they’re noise, not real structure!
Real-World Failure Scenarios
| Environment | Features | Matches | Inliers | Tracking |
|---|---|---|---|---|
| Bookshelf | ~900 | ~540 | ~120 | ✅ Excellent |
| Desk with objects | ~850 | ~480 | ~100 | ✅ Good |
| Textured wall (posters) | ~600 | ~350 | ~80 | ✅ Good |
| Plain painted wall | ~800 | ~30 | 0 | ❌ FAILS |
| White ceiling | ~700 | ~25 | 0 | ❌ FAILS |
| Looking at floor | ~500 | ~40 | 0 | ❌ FAILS |
Eureka Moment #9
Why it fails: - Feature detectors (ORB, SIFT) need corners/edges - Blank walls have no distinctive points - Can’t match what doesn’t exist!
What IMU provides: - IMU measures motion directly from physics - Works regardless of what camera sees - Can track through textureless regions
Real robot scenarios: - Warehouse: long plain corridors - Hospital: white walls everywhere - Factory: uniform floors - Outside: blue sky, open fields
Experiment 10: Lighting Changes = Drift
What You’ll Experience
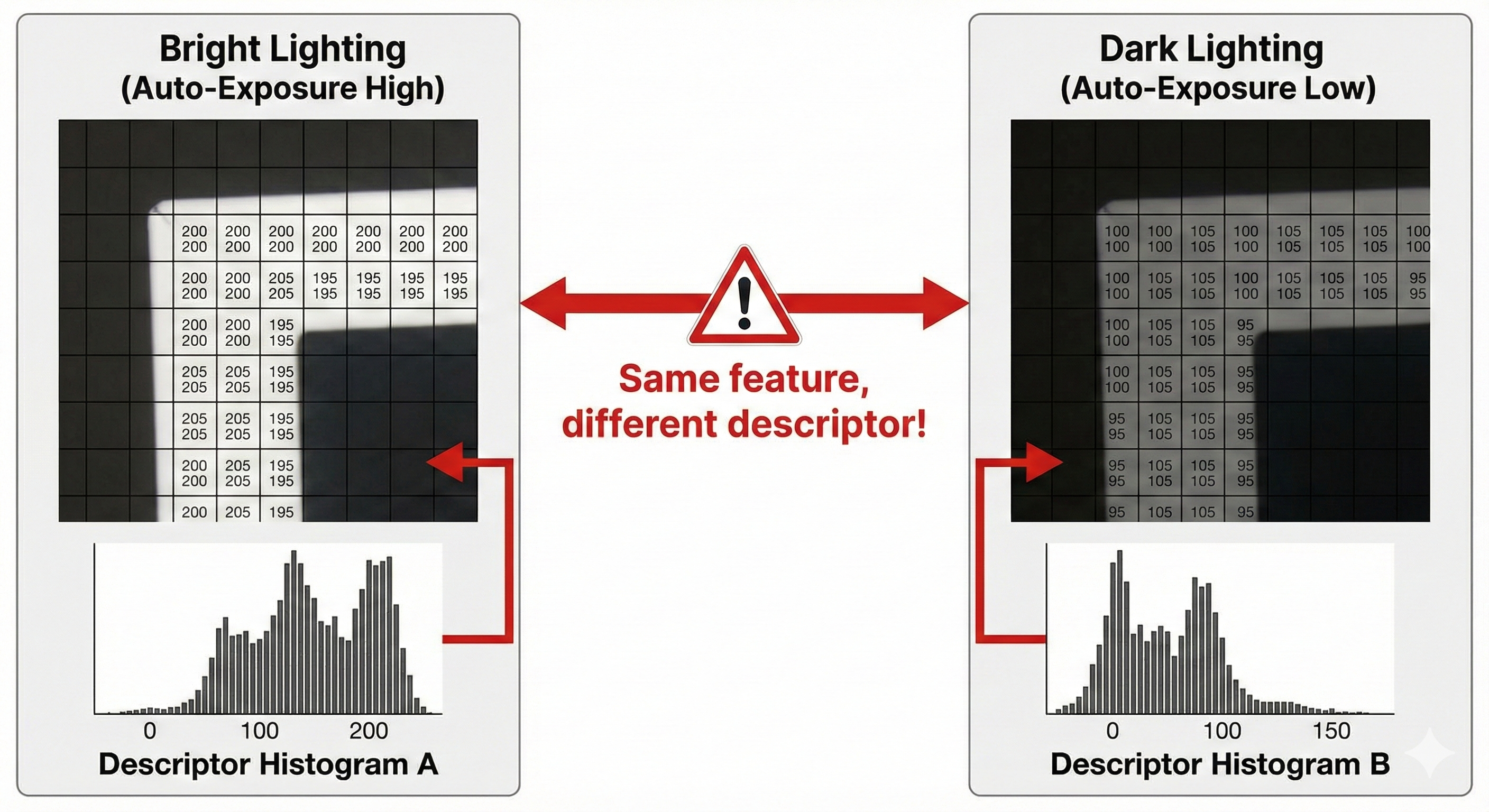
Visual features depend on pixel values. Lighting changes alter those values, causing feature matching to degrade.
The Test
# Start with normal room lighting
# Monitor odometry position
# Then:
# 1. Turn lights off
# 2. Walk toward/away from window
# 3. Point camera at light source then awayWhat Happens
┌─────────────────────────────────────────────────────────────────────────┐
│ LIGHTING CHANGES vs VISUAL ODOMETRY │
│ │
│ Before (normal light) After (auto-exposure change) │
│ ┌─────────────────┐ ┌─────────────────┐ │
│ │ ★(200,200,200) │ │ ★(100,100,100) │ │
│ │ ★(180,180,180)│ ──► │ ★(90,90,90) │ │
│ │ ★(210,210,210) │ │ ★(105,105,105) │ │
│ └─────────────────┘ └─────────────────┘ │
│ │
│ Same features, different pixel values! │
│ Feature descriptor matching becomes unreliable. │
│ │
│ Results: │
│ • Fewer matches than expected │
│ • More outliers/bad matches │
│ • Gradual drift or sudden jumps │
└─────────────────────────────────────────────────────────────────────────┘D435i Auto-Exposure
The RealSense camera adjusts exposure automatically, which can cause tracking degradation:
# Check current exposure
ros2 topic echo /camera/camera/color/camera_info --once
# Monitor tracking during lighting changes
ros2 topic echo /rtabmap/odom_info --field lost --field inliersExpected Behavior - Lighting Change Test
Scenario: Point camera at window, then pan away (auto-exposure triggers)
Time Lost Features Matches Inliers Lighting Status
----------------------------------------------------------------------
1s false 905 540 118 Normal room light
2s false 898 525 112 Normal
3s false 892 518 105 Panning toward window
4s false 756 312 68 Auto-exposure adjusting
5s false 684 245 42 Bright → darker transition
6s true 423 89 0 LOST! Descriptors changed
7s true 512 124 12 LOW - recovering
8s false 834 456 78 Stabilized at new exposure
----------------------------------------------------------------------
ANALYSIS:
- During exposure transition (frames 4-7), tracking degraded
- Inliers dropped: 118 → 42 → 0 → 12 → 78
- Recovery took ~2-3 seconds after exposure stabilizedThe problem: Same physical features have different pixel values after exposure change, causing descriptor mismatches!
Eureka Moment #10
Why it happens: - Feature descriptors encode pixel values - Lighting changes alter pixel values - Same physical feature → different descriptor - Matching confidence drops
What IMU provides: - IMU measures acceleration and rotation - Completely independent of lighting - Works in complete darkness!
This matters for robots: - Day/night transitions - Indoor/outdoor transitions - Moving shadows - Flickering lights
The Opposite Weaknesses Pattern
Now we can see the beautiful symmetry between IMU and vision problems:
┌─────────────────────────────────────────────────────────────────────────┐
│ IMU vs VISION: OPPOSITE WEAKNESSES │
│ │
│ IMU VISION │
│ ─── ────── │
│ │
│ Fast Motion: ✅ Excellent ❌ Fails (blur) │
│ (400 Hz sampling) (feature loss) │
│ │
│ Slow Motion: ⚠️ Drifts ✅ Excellent │
│ (integration error) (clear features) │
│ │
│ Textureless: ✅ Works ❌ Fails │
│ (physics-based) (no features) │
│ │
│ Darkness: ✅ Works ❌ Fails │
│ (no light needed) (camera blind) │
│ │
│ Long Duration: ❌ Fails ✅ Loop closure │
│ (unbounded drift) (corrects drift) │
│ │
│ Absolute Yaw: ❌ No reference ✅ Map-relative │
│ (needs magnetometer) (visual landmarks) │
│ │
│ │
│ These are COMPLEMENTARY failure modes! │
│ Fusion can leverage the strengths of both! │
│ │
└─────────────────────────────────────────────────────────────────────────┘
Comparison Table
| Scenario | IMU Alone | Vision Alone | Fusion (VIO) |
|---|---|---|---|
| Stationary | ✅ OK (filtered) | ✅ OK | ✅ OK |
| Slow motion | ⚠️ Drifts | ✅ Excellent | ✅ Excellent |
| Fast motion | ✅ OK | ❌ Fails | ✅ IMU rescues |
| Textureless | ✅ OK (short term) | ❌ Fails | ✅ IMU bridges |
| Darkness | ✅ OK | ❌ Fails | ⚠️ IMU only |
| Long duration | ❌ Fails | ⚠️ Loop closure helps | ✅ Best of both |
The Math Doesn’t Work: Why We Need Both
IMU Integration Grows Error
Position error from IMU ∝ t²
With 0.01 m/s² bias:
• After 10s: ~0.5m error
• After 60s: ~18m error
• After 5 min: ~450m error!
IMU needs periodic "corrections" from an absolute source.Vision Needs Continuous Features
Visual odometry gap = no features for N frames
If camera sees blank wall for 1 second (30 frames):
• No feature matches possible
• Odometry output: NOTHING or WRONG
• Robot has no idea where it went
Vision needs something to "fill the gaps" during feature-less periods.The Solution Preview
┌─────────────────────────────────────────────────────────────────────────┐
│ WHY FUSION WORKS │
│ │
│ Time ────────────────────────────────────────────────────────► │
│ │
│ IMU: ████████████████████████████████████████████████████ │
│ Always available, but drifting over time │
│ │
│ Vision: ▓▓▓▓▓▓░░░░░▓▓▓▓▓▓▓▓▓▓░░░░▓▓▓▓▓▓▓▓▓▓▓▓░░░▓▓▓▓▓▓▓▓▓ │
│ Sometimes lost (fast motion, textureless) │
│ │
│ VIO: ████████████████████████████████████████████████████ │
│ IMU: continuous prediction │
│ Vision: periodic correction │
│ Result: STABLE, CONTINUOUS pose estimation! │
│ │
└─────────────────────────────────────────────────────────────────────────┘Summary: Vision-Only Failures
┌─────────────────────────────────────────────────────────────────────────┐
│ PART 2 SUMMARY: WHY VISION ALONE FAILS │
│ │
│ Problem #8: Fast motion causes motion blur │
│ ──────────────────────────────────────────── │
│ Measured: 100% of frames LOST during shake │
│ Solution: IMU at 400Hz bridges the visual gaps (Part 3!) │
│ │
│ Problem #9: Textureless surfaces have no features │
│ ──────────────────────────────────────────────── │
│ Measured: ~800 features detected but 0 inliers matched │
│ Solution: IMU maintains pose estimate during visual blackout │
│ │
│ Problem #10: Lighting changes break feature descriptors │
│ ──────────────────────────────────────────────── │
│ Measured: Inliers drop 118 → 0 during exposure change │
│ Solution: IMU is completely independent of lighting! │
│ │
│ ═══════════════════════════════════════════════════ │
│ KEY INSIGHT: Vision and IMU have OPPOSITE failures! │
│ Fast motion: IMU ✅, Vision ❌ │
│ Textureless: IMU ✅, Vision ❌ │
│ Long duration: IMU ❌, Vision ✅ │
│ This is what makes FUSION so powerful! → Part 3 │
│ ═══════════════════════════════════════════════════ │
│ │
└─────────────────────────────────────────────────────────────────────────┘What’s Next: The Solution!
We’ve now experienced both:
- Part 1: IMU alone → drift, yaw problems
- Part 2: Vision alone → fast motion, textureless failures
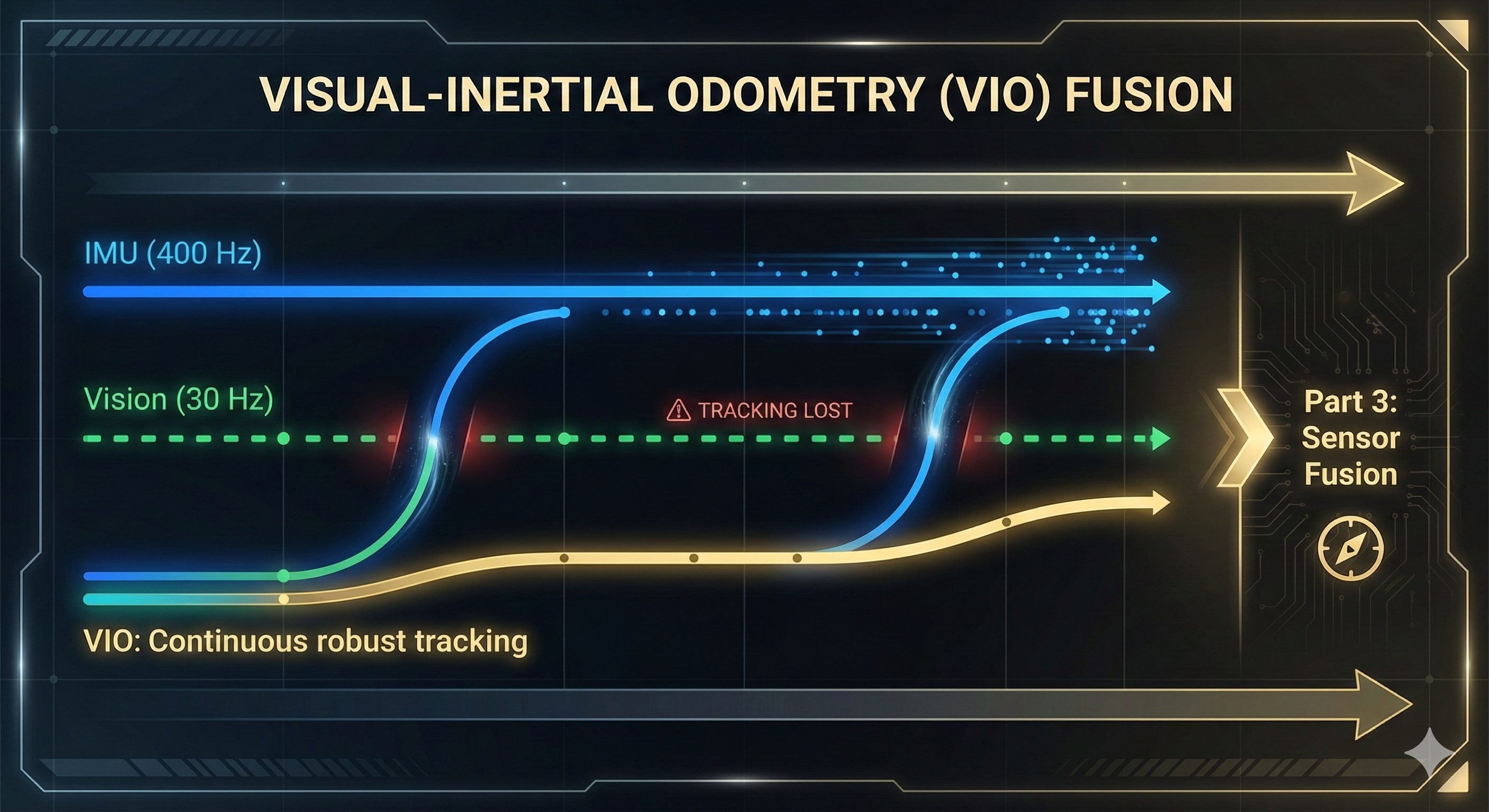
In Part 3, we’ll combine them into Visual-Inertial Odometry (VIO):
- IMU provides high-frequency motion estimates
- Vision corrects drift periodically
- Result: Robust pose estimation that handles both failure modes!
Part 3 experiments: - Experiment 11: IMU rescues fast motion - Experiment 12: Vision corrects IMU drift - Experiment 13: Isaac ROS Visual SLAM with IMU - Experiment 14: Complete VIO pipeline
We’ll build exactly what yDx.M + external sensors achieves - with our D435i alone!
Preparation Checklist
Before Workshop 4, make sure you can:
About This Learning Journey
By experiencing these failures firsthand, you’ll:
- Deeply understand why sensor fusion exists
- Appreciate what yDx.M + external sensors achieve
- Know when each sensor type is reliable
- Debug fusion problems by understanding individual sensor limits
The workshop will show professional solutions - we’re building the foundation to understand them!